 |
| De Bothezat Quadrotor, 1923. |
Sebuah quadrotor juga disebut helikopter quadrotor atau quadrocopter, adalah sebuah pesawat yang diangkat dan didorong oleh empat rotor. Quadrotors diklasifikasikan sebagai helikopter, sebagai lawan pesawat sayap tetap, karena mereka berasal dari empat rotor. Mereka juga dapat diklasifikasikan sebagai helikopter, meskipun tidak seperti helikopter standar, quadrotors menggunakan lapangan tetap pisau, rotor lapangan tidak berbeda sebagai pisau berputar. Pengendalian gerak kendaraan dapat dicapai dengan memvariasikan kecepatan relatif dari masing-masing rotor untuk mengubah tujuan dan torsi yang dihasilkan oleh masing-masing.
Kontrol Penerbangan
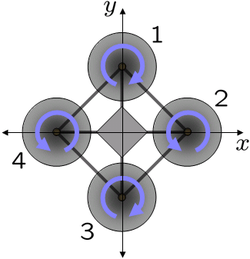 Setiap rotor menghasilkan baik dorong dan torsi sekitar pusat rotasi, serta kekuatan yang berlawanan arah drag untuk kendaraan penerbangan. Jika semua rotor yang berputar dengan kecepatan sudut yang sama, dengan satu dan tiga rotor berputar searah jarum jam dan rotor dua dan empat berlawanan, torsi aerodinamis bersih, dan karenanya percepatan sudut terhadap sumbu yaw persis nol, yang menyiratkan bahwa yaw menstabilkan rotor helikopter konvensional tidak diperlukan. Yaw diinduksi oleh ketidakcocokan saldo di torsi aerodinamis (yaitu,oleh offsetting perintah dorong kumulatif antara counter-rotatingpasang pisau).
Setiap rotor menghasilkan baik dorong dan torsi sekitar pusat rotasi, serta kekuatan yang berlawanan arah drag untuk kendaraan penerbangan. Jika semua rotor yang berputar dengan kecepatan sudut yang sama, dengan satu dan tiga rotor berputar searah jarum jam dan rotor dua dan empat berlawanan, torsi aerodinamis bersih, dan karenanya percepatan sudut terhadap sumbu yaw persis nol, yang menyiratkan bahwa yaw menstabilkan rotor helikopter konvensional tidak diperlukan. Yaw diinduksi oleh ketidakcocokan saldo di torsi aerodinamis (yaitu,oleh offsetting perintah dorong kumulatif antara counter-rotatingpasang pisau).Percepatan sudut tentang pitch dan sumbu gulungan dapat disebabkan secara terpisah tanpa mempengaruhi sumbu yaw.Setiap sepasang pisau berputar dalam arah yang sama kontrolsatu sumbu, baik roll atau pitch, dan dorong untuk satu rotor meningkat sedangkan penurunan dorong untuk yang lain akan mempertahankan keseimbangan torsi yang dibutuhkan untuk stabilitas yaw dan menginduksi torsi internet tentang gulungan atau sumbu lapangan . Dengan cara ini, baling-baling tetap dapat dibuat untuk manuver kendaraan rotor quad dalam semua dimensi. Percepatan translasi dicapai dengan mempertahankan lapangan non-nol atau sudut roll.
Video dari QuadroCopter







0 comments:
Posting Komentar
Tinggalkan pesan anda untuk kami baca !!!